
Otthon / Hír / Ipari hírek / Milyen motorokat használnak az AGV rendszerekben, és hogyan válasszuk ki a megfelelő AGV hajtómotort?

 nyelv
nyelv
Alkalmazási ágazat
Agv
Automatizált robotok

lézervágás

Logisztikai válogatás

Fotovoltaikus erőművészet

Orvostechnikai eszközök
Milyen motorokat használnak az AGV rendszerekben, és hogyan válasszuk ki a megfelelő AGV hajtómotort?
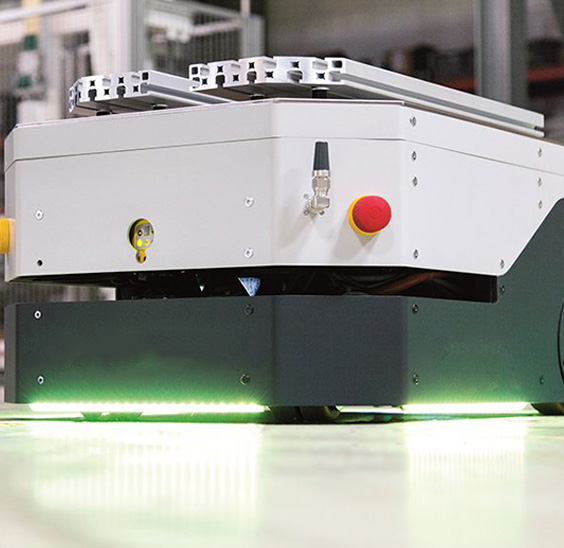
A hajtómotor a legkritikusabb elektromechanikus alkatrész az autonóm irányított járművekben (AGV). Meghatározza, hogy az AGV hogyan gyorsul, milyen pontosan pozícionálja magát, mekkora hasznos terhet tud mozgatni, mennyi ideig bírja az akkumulátor a töltések között, és mennyi ideig működik a jármű, mielőtt a hajtásrendszer karbantartást igényel. Az alulteljesítményű vagy helytelenül meghatározott hajtómotorral rendelkező AGV a gyártás során nem tudja teljesíteni a hasznos teher és a sebesség követelményeit; a rossz motorhatásfokúak gyorsabban lemerítik az akkumulátort, mint amennyit a logisztikai művelet képes befogadni; a gyakori karbantartást igénylő hajtómotorral rendelkezők nem tervezett leállásokat idéznek elő egy olyan rendszerben, amelynek teljes értékajánlata a megbízható, folyamatos autonóm működés.
Az AGV-rendszerintegrátorok, a hajtáskomponenseket meghatározó robotmérnökök, az AGV-platformokat értékelő raktárautomatizálási csapatok és az új AGV-járműveket tervező OEM-berendezés-fejlesztők számára az AGV-hajtásrendszerekben használt motortechnológiák – és a specifikációs paraméterek, amelyek meghatározzák, hogy melyik technológia melyik alkalmazáshoz – elengedhetetlen tudás a megfelelő alkatrész-döntések meghozatalához. Ez az útmutató ismerteti az AGV hajtómotor típusait, a kiválasztási paramétereket és azokat a speciális követelményeket, amelyek megkülönböztetik az AGV motor alkalmazásokat az általános ipari motoralkalmazásoktól.
Miért különböznek az AGV meghajtómotorok követelményei az általános ipari motorok követelményeitől?
Az AGV hajtómotorok olyan igényes és jellegzetes körülmények között működnek, amelyek elválasztják őket a legtöbb általános ipari motoralkalmazástól:
Akkumulátoros tápegység. Minden AGV akkumulátorról működik – egyenáramú akkumulátorcsomagról (jellemzően 24 V, 36 V vagy 48 V névleges) működik anélkül, hogy csatlakozna a váltóáramú hálózathoz. Ehhez alapvetően DC-kompatibilis hajtómotorokra van szükség. A váltakozó áramú motorok használhatók a fedélzeti inverterekkel, de az egyenáramról váltóáramra történő inverzió hatékonysági büntetése jelentős az akkumulátoros rendszerben. Az egyenáramú motorok – és különösen a BLDC motorok – a domináns választás, mivel közvetlenül (vagy DC-DC átalakítón keresztül) fogadják el az akkumulátort, inverziós büntetés nélkül.
Gyakori start-stop ciklusok. Az AGV-k nyugalmi helyzetből haladási sebességre gyorsulnak, elnavigálnak egy pick- vagy befizetési ponthoz, és megállnak – naponta többször, százszor vagy ezerszer. A hajtómotornak ezt az indítási-leállítási ciklust túlmelegedés vagy túlzott kopás nélkül kell kezelnie, ami megköveteli a motor hőszabályozását, és kefés motorok esetén a nagyáramú indítási tranzienseket kezelő kommutátor-kefe szerelvényt.
Kétirányú működés. Az AGV-knek előre- és hátramenetben is kell haladniuk – és tisztán kell váltaniuk az irányok között, mechanikai ütés nélkül. A motornak és vezérlőjének támogatnia kell a zökkenőmentes kétirányú fordulatszám szabályozást. Kormányzási differenciálműves AGV-knél (ahol a bal és jobb oldali független keréksebesség-szabályozás kanyarodást eredményez) a két hajtómotornak pontosan meg kell felelnie a sebesség-nyomaték válasznak a pontos kormányzás érdekében.
Pontos sebesség- és pozíciószabályozás. A modern AGV-k – különösen a lézer-vezérelt (LiDAR), látásvezérelt vagy mágneses nyomtávú AGV-k – navigációs pontossága precíz fordulatszám-szabályozást, és egyes rendszerekben precíz helyzet-visszajelzést igényel a meghajtómotor-kódolótól. A motornak egyenletes, ellenőrzött sebességgel kell működnie a hasznos teher és a tereptartományban, sebességvadászat vagy instabilitás nélkül.
Nagy hatékonyság az akkumulátor élettartama érdekében. Az akkumulátorral hajtott autonóm járművekben a motor hatékonysága közvetlenül meghatározza a töltések közötti működési időt. A 75% helyett 85%-os hatásfokkal működő hajtómotor-rendszer hozzávetőlegesen 13%-kal növeli meg a jármű működési tartományát, ami logisztikai alkalmazásokban a különbség lehet aközött, hogy egy jármű egy akkumulátorcikluson belül teljesíti az útvonalat, és egy előre nem tervezett töltési leállítást igényel. Az energiahatékonyság első osztályú követelmény az AGV-motorok kiválasztásánál, nem pedig másodlagos szempont.
Az AGV hajtásrendszerekben használt fő motortípusok
Kefe nélküli egyenáramú hajtóműves motorok (BLDC): A domináns AGV hajtástechnológia
A kefe nélküli egyenáramú hajtóműves motorok a túlnyomórészt előnyben részesített hajtómotor-technológia a modern AGV rendszerekben. A BLDC motor helyettesíti a hagyományos kefés egyenáramú motor mechanikus kommutátorát és kefeszerelvényét elektronikus kommutációval – a motorvezérlő leolvassa a forgórész helyzetét (Hall-effektus-érzékelők vagy jeladó visszacsatolása révén), és a megfelelő sorrendben kapcsolja az állórész tekercseit, hogy fenntartsa a forgást fizikai kefe érintkezés nélkül. Ez az elektronikus kommutáció adja a BLDC motorok meghatározó előnyeit a kefés motorokkal szemben az AGV-kontextusban:
Nincs kefe kopás = nincs kefe karbantartása. A kefés egyenáramú motorban a kommutátor gyűrűit nyomó szénkefék működés közben folyamatosan kopnak. Magas munkaciklus esetén – napi 20 órát üzemelő AGV-k háromműszakos logisztikai műveletekben – a kefecsere-intervallumok hónapokon belül elérhetők, ütemezett állásidőt és cseremunkát igényelve. A BLDC motorok nem viselnek kefét; az egyetlen kopó alkatrészek a motor csapágyai, amelyek élettartama több ezer órában mérhető. A folyamatosan működő AGV-flotta esetében a kefekarbantartás kiküszöbölése magas üzemeltetési költséget és üzemidő-előnyt jelent.
Magasabb hatásfok. A BLDC motorok jellemzően 90–95%-os elektromos-mechanikai hatásfokot érnek el névleges működési pontjukon, szemben az egyenértékű kefés egyenáramú motorok 75–85%-ával. Akkumulátoros AGV-ben ez a hatékonyságkülönbség közvetlenül több munkaidőt jelent töltési ciklusonként.
Jobb hőteljesítmény. A BLDC motorhő elsősorban az állórész tekercseiben keletkezik, amelyek közvetlenül érintkeznek a motorházzal, így a hőelvezetés hatékony. A kefés motorok hőt termelnek mind a tekercseknél, mind a kommutátor/kefe érintkezési pontján, a kefe érintkezési pontja pedig a motor belsejében van, ahol a hőelvezetés kevésbé hatékony. A BLDC motorok nagyobb folyamatos működési ciklust tartanak fenn túlmelegedés nélkül.
Pontos sebességszabályozás. Az elektronikus kommutáció kódolóval vagy Hall-érzékelő visszacsatolása lehetővé teszi a szoros, zárt hurkú fordulatszám-szabályozást széles működési tartományban. Az AGV-navigációs algoritmusok a pontos keréksebesség-visszacsatolástól függenek az abszolút helyzetrögzítések közötti holtpontos helyzetbecsléshez – az enkóderes visszacsatolású BLDC motorok ezt a pontosságot megbízhatóan biztosítják.
Szálcsiszolt egyenáramú hajtóműves motorok: Költséghatékony kisebb terhelésű AGV alkalmazásokhoz
A szálcsiszolt egyenáramú hajtóműves motorokat továbbra is használják az AGV-alkalmazásokban, ahol az üzemi munkaciklus alacsonyabb (nem folyamatos, 24 órás üzem), ahol szerények a hasznos teherigények, és ahol az alacsonyabb motorköltség prioritást élvez a költségérzékeny AGV platformokon. A könnyű belső logisztikára – kisalkatrészek szállítása, dokumentumszállítás, könnyű gyártósor támogatása – tervezett AGV-kben a kefés egyenáramú motorok által megkövetelt egyszerűbb vezérlőelektronika (nincs szükség kommutációs vezérlőre) és alacsonyabb egységköltsége indokolhatja a BLDC alternatívákkal szembeni választásukat a kefe karbantartási igénye ellenére.
A szálcsiszolt egyenáramú motorok nagyon magas indítónyomatékot is biztosítanak – egyes kiviteleknél nagyobb, mint az azonos méretű BLDC motorok –, ami hasznos lehet lejtőn terhelés alatt induló AGV-k esetében. A modern BLDC motorvezérlők azonban képesek megismételni ezt a nagy indítónyomaték-viselkedést a mezőorientált szabályozási stratégiákkal, csökkentve a kefés motor történelmi előnyét ezen a területen.
Bolygókerekes hajtóműves motorok AGV hajtott kerekekhez
Függetlenül attól, hogy a motorelem kefés vagy kefe nélküli egyenáramú, az AGV hajtókerekek szinte általánosan alkalmaznak bolygókerekes redukciót a motor és a kerék között. A bolygókerekes hajtómű konfigurációja az előnyben részesített sebességváltó típus az AGV alkalmazásokhoz, több okból is:
A bolygókerekes fogaskerekek biztosítják a legnagyobb nyomatéksűrűséget – a legnagyobb kimenő nyomatékot egy adott sebességváltó külső átmérőjéhez –, ami kritikus fontosságú az AGV kerékszerelvényeknél, ahol a teljes motor-hajtómű-kerék egységnek a jármű alvázára vonatkozó szigorú méretkorlátok közé kell illeszkednie. A bolygókerekes hajtómű koaxiális bemeneti/kimeneti beállítása kompakt soros összeszerelést tesz lehetővé: motor → bolygókerekes hajtómű → hajtókerék, mindezt egyetlen tengelyen, a homlok- vagy csigahajtómű-csökkentés okozta eltolás nélkül.
A bolygókerekes hajtóművek magas hatásfokot (fokozatonként 92–97%) is biztosítanak a csigahajtóművek alternatíváihoz képest (általában 50–85% az áttételtől és az elvezetési szögtől függően), ami fontos az akkumulátor-hatékonyság szempontjából kritikus AGV alkalmazásokban. Egy csigakerekes AGV hajtómotor, amely 70%-os hajtómű-hatékonyságon működik, a motor elektromos energiájának 30%-át elveszíti, hogy csak a sebességváltóban melegedjen fel – ez elfogadhatatlan büntetés az akkumulátoros jármű esetében.
Főbb specifikációs paraméterek az AGV hajtómotor kiválasztásához
| Paraméter | Tipikus AGV specifikációs tartomány | Miért számít |
|---|---|---|
| Névleges feszültség | 24V / 36V / 48V DC | Meg kell egyeznie az AGV akkumulátorcsomag feszültségével; a nagyobb feszültség nagyobb teljesítményt tesz lehetővé alacsonyabb áram mellett, csökkentve a kábelveszteséget és a motor hőmérsékletét |
| Névleges teljesítmény | 50 W – 1000 W hajtómotoronként (a járműtől és a hasznos terheléstől függően) | Elegendőnek kell lennie ahhoz, hogy a megrakott jármű felgyorsuljon a működési környezet legmeredekebb lejtőjén; az alacsony teljesítmény a motor termikus túlterhelését okozza lejtőn |
| Kimeneti sebesség a kormánynál | 50-300 ford./perc (keréktengely, sebességcsökkentés után) | Meghatározza a jármű haladási sebességét; A kerék átmérője és az AGV célsebessége határozza meg a szükséges kimenő tengely fordulatszámát és ezáltal a szükséges áttételi arányt |
| Folyamatos kimeneti nyomaték | 5–200 Nm hajtómotoronként (a hasznos tehertől és a dőlésszögtől függően) | Meg kell haladnia azt a nyomatékot, amely a teljesen megterhelt AGV névleges fordulatszámon a maximális lejtőn történő mozgatásához szükséges; alkalmazzon 2-szeres biztonsági tényezőt a lökésterhelési ráhagyáshoz |
| Csúcsnyomaték | 2×–3× folyamatos nyomaték | Teljes terhelés mellett álló helyzetből történő gyorsításhoz szükséges; a motornak és a vezérlőnek fenn kell tartania a csúcsnyomatékot a gyorsulási rámpa időtartama alatt túlmelegedés vagy túláramvédelem kiváltása nélkül |
| Kódoló felbontás | 100–4096 PPR (fordulatonkénti impulzusok a motor tengelyénél) | Meghatározza a kilométer-mérési pontosságot a halott számítású navigációhoz; a nagyobb kódolófelbontás javítja a pozícióbecslést a navigációs érzékelők abszolút pozíciója között |
| Hatékonyság | ≥ 85% összességében (motoros sebességváltó) névleges üzemi ponton | Közvetlenül meghatározza az akkumulátor működési idejét; A BLDC bolygómű 90%-os kombinált hatékonyságot ér el; előnyben részesítsd ezt a szálcsiszolt csigakerékkel szemben (60-70% együtt) |
| IP minősítés | IP54 minimum az általános beltéri logisztikához; IP65 nedves vagy poros környezethez | az AGV motorok padlószintű szennyeződéseknek vannak kitéve; a nem megfelelő behatolásvédelem a csapágyak és a tekercselés idő előtti meghibásodásához vezet por és nedvesség miatt |
| Üzemi ciklus | S1 folyamatos a 24 órás működéshez; S3 szakaszos egyműszakos | A motor hőteljesítményének meg kell egyeznie a működési mintával; az S3 szakaszos üzemre tervezett motor túlmelegszik folyamatos S1 AGV alkalmazásoknál |
Hogyan számítsuk ki a szükséges AGV hajtómotor nyomatékát
Az AGV állandó sebességű, sík felületen történő meghajtásához szükséges nyomatéknak le kell győznie a gördülési ellenállást; lejtőn a gravitáció fokozatos ellenállási komponenst ad hozzá. Egy tipikus kétkerekű AGV számítása:
A jármű össztömege: W = (AGV tára maximális hasznos teher) × g [Newton]
Gördülési ellenállási erő: F_gördülés = W × μ_r, ahol μ_r a gördülési ellenállási együttható (általában 0,01–0,02 gumikerekek esetén sima betonon; 0,02–0,05 puha padlón vagy érdes felületeken)
Lejtési ellenállási erő (lejtőkre): F_grade = W × sin(θ), ahol θ a lejtőszög (5%-os fokozat esetén θ ≈ 2,86°, sin(θ) ≈ 0,05)
Teljes hajtóerő: F_total = F_guruló F_grade
Szükséges nyomaték a hajtókeréknél (motoronként, két hajtómotort feltételezve): T_wheel = (F_összesen / 2) × r_wheel, ahol r_wheel a meghajtókerék sugara méterben
Szükséges motor nyomaték: T_motor = T_kerék / (i × η), ahol i a sebességcsökkentési arány, és η a sebességváltó hatásfoka
Például egy AGV 500 kg össztömeggel, 150 mm átmérőjű hajtott kerekekkel, 3%-os minőségben, 25:1 bolygókerekes sebességváltóval, 0,95 hatásfokkal:
- W = 500 × 9,81 = 4905 N
- F_gurulás = 4905 × 0,015 = 73,6 N
- F_grade = 4905 × 0,03 = 147,2 N
- F_összesen = 220,8 N; motoronként = 110,4 N
- T_kerék = 110,4 × 0,075 = 8,28 Nm
- T_motor = 8,28 / (25 × 0,95) = 0,35 Nm névleges folyamatos nyomaték
Adjon hozzá 2-szeres biztonsági tényezőt a gyorsulási nyomatékhoz: a motor maximális nyomatékigénye ≈ 0,70 Nm. A BLDC bolygókerekes hajtóműves motor ≥ 0,70 Nm csúcsnyomatékkal 48 V-on, 25:1 arányban megfelel ennek a követelménynek. A folyamatos névleges nyomatékot a folyamatos szükséges nyomatékhoz (0,35 Nm teljes hasznos teher mellett, a lejtőn) kell ellenőrizni megfelelő hőtartalék mellett.
Gyakran Ismételt Kérdések
Hogyan befolyásolja az AGV kormányszerkezete a motorválasztást?
Az AGV-k többféle kormányzási konfigurációt használnak, amelyek mindegyike eltérő motorigényekkel rendelkezik. A differenciálhajtás (két független meghajtó kerék, kormánykerék nélkül) a két hajtómotor különböző sebességgel történő működtetésével hozza létre a kanyarokat – ehhez mindkét motornak szorosan illeszkednie kell a fordulatszám-nyomaték karakterisztikájához, és egy koordinált motorvezérlővel kell vezérelnie, amely egyidejűleg mindkét keréken vezérelheti a sebességkülönbséget. A háromkerekű kormányzás (egy kormányzott hajtókerék elöl, két passzív hátsó kerék) egyetlen hajtómotort használ külön kormányművel – a motor kiválasztása egyszerű, de figyelembe kell venni a kormányműködtető integrálását. A többirányú hajtások (mecanum vagy omni kerekek minden sarkon) négy külön-külön vezérelt motort használnak, és lehetővé teszik az oldalirányú és átlós mozgást – a motorvezérlőknek kezelniük kell a négycsatornás koordinációt, és a motoroknak kiváló sebesség-illesztési jellemzőkkel kell rendelkezniük működési tartományukban.
Milyen típusú jeladót ajánlunk AGV hajtómotorokhoz?
Az inkrementális jeladók (kvadratúra A/B kimenet) a legelterjedtebb típusok az AGV meghajtómotorok kilométer-méréséhez – ezek biztosítják a fordulatonkénti impulzusszámot, amelyet a navigációs vezérlő a megtett kerék távolságára és sebességére alakít át. Az abszolútérték-jeladókat időnként olyan alkalmazásokban használják, amelyek megkövetelik, hogy a vezérlő ismerje a pozíciót a bekapcsolás utáni homing nélkül, de az odometriához (távolságméréshez) az inkrementális jeladók szabványosak. Az 500–1000 PPR felbontás a motor tengelyénél jellemzően elegendő a jó kilométer-mérési pontossághoz normál bolygókerekes áttételi áttétel mellett. A nagyobb felbontás (2000–4096 PPR) javítja a kilométer-mérést az alacsony áttételi arányú rendszerekben, ahol a keréktengely motorfordulatonként a fordulat nagyobb részét mozgatja.
Használhatók AGV hajtómotorok regeneratív fékezéssel?
Igen – A BLDC motorvezérlők az AGV-alkalmazásokban általában támogatják a regeneratív fékezést, ahol a motor generátorként működik lassítás közben, és a kinetikus energiát visszaalakítja elektromos energiává, amely újratölti az akkumulátort. A regeneratív fékezés csökkenti az akkumulátor fogyasztását (különösen a stop-and-go AGV útvonalakon, ahol gyakori lassulás történik), csökkenti a fékek kopását, és gyorsabb lassítást tesz lehetővé mechanikus fékmelegedés nélkül. A regeneratív fékezés energia-visszanyerési hatékonysága egy tipikus AGV-alkalmazásban a gyorsításhoz felhasznált energia 15-30%-a, ami a nagyfrekvenciás, rövid útvonalú műveleteknél értendő. A regenerációs képesség megköveteli, hogy a motorvezérlő támogassa a kétirányú áramáramlást, és hogy az akkumulátorvezérlő rendszer fogadja a regenerált töltőáramot anélkül, hogy túlfeszültség-védelembe lépne.
AGV hajtómotorok a Zhejiang Saiya Intelligent Manufacturing cégtől
Zhejiang Saiya Intelligent Manufacturing Co., Ltd. , Deqing, Zhejiang, BLDC bolygókerekes hajtóműves motorokat, szálcsiszolt egyenáramú bolygókerekes hajtóműves motorokat és komplett AGV hajtómotor-egységeket gyárt autonóm irányított járművekhez. Az AGV termékválasztéka magában foglalja a 24V, 36V és 48V névleges akkumulátorfeszültségű, integrált jeladókkal ellátott hajtómotor-egységeket, 32-82 mm átmérőjű vázméretekben, 5:1-től 500:1-ig terjedő bolygókerekes áttétel-áttétellel, a könnyű teherbírású kis-alkatrészek szállításától a nehéz anyagmozgatási platformokig. Az egyedi AGV motor specifikációi – feszültség, arány, kódoló felbontás, rögzítés, IP-besorolás és csatlakozó – elérhetők a vállalat OEM/ODM fejlesztési szolgáltatásán keresztül.
Forduljon hozzánk AGV specifikációival – a jármű tömegével, hasznos teherbírásával, maximális sebességével, akkumulátorfeszültségével, kerékátmérőjével és működési környezetével –, hogy megkapja a hajtómotorra vonatkozó ajánlást és árajánlatot.
Kapcsolódó termékek: AGV projekt termékek | Kefe nélküli DC hajtóműves motorok | Bolygóhajtóműves motorok | Precíziós bolygóműves sebességváltó | Szálcsiszolt DC hajtóműves motorok
Kapcsolódó termékek
-

Ez a 6W-os indukciós AC sebességváltó motor hatékony, kompakt és megbízható kis motor, amely alkalmas ipari és háztartási alkalmazások széles skálájára. Használható feszültségben, az egyfázisú 110 ...
Lásd a részleteket -

A 6W -os kefe DC GBEAR motort hatékonyságra és sokoldalúságra tervezték, különféle alkalmazásokhoz. A 60 mm x 60 mm -es kompakt keretmérettel zökkenőmentesen illeszkedik a szűk terekhez. A motor 12...
Lásd a részleteket -

A 10W -os kefe DC Gear Motor nagy teljesítményű és alkalmazkodóképességet kínál az ipari és hobbi alkalmazások számára. A 60 mm x 60 mm -es keretmérettel ezt a motort úgy tervezték, hogy a zárt ter...
Lásd a részleteket -

A 24 V -os kefe nélküli fogaskerék motorja sokoldalú és hatékony motor, amelyet számos alkalmazáshoz terveztek. A 60 mm x 60 mm és 104 mm x 104 mm közötti méretekkel ez a motor különféle berendezés...
Lásd a részleteket -

A 32 mm -es csiszolt bolygófegyver -motor egy kompakt és hatékony megoldás, amelyet különféle alkalmazásokhoz terveztek, amelyek nagy nyomatékot és pontos vezérlést igényelnek. A 32 mm -es átmérőjé...
Lásd a részleteket -

A 42 mm -es kefe bolygókészülék motorja sokoldalú és hatékony alkatrész, amelyet széles körben használnak különféle alkalmazásokban, amelyek pontos nyomatékot és sebességszabályozást igényelnek. A ...
Lásd a részleteket -

A 32 mm-es kefe nélküli bolygófegyver-motor nagy teljesítményű, kompakt megoldás, amely ideális a hatékonyságot és a megbízhatóságot igénylő alkalmazásokhoz. A 24 V -os névleges feszültséggel és 20...
Lásd a részleteket -

A 42 mm-es kefe nélküli bolygómotor egy nagy hatékonyságú motoros termék, amelyet széles körben használnak különféle forgatókönyvekben, amelyek precíziós sebességváltót igényelnek. Ennek a motornak...
Lásd a részleteket -

Az SPE sorozatú sebességváltókat, a karimat mérettartományát 40, 60, 80, 120 és 160 modellekkel, hatékony és robusztus energiaátviteli megoldások biztosítására tervezték. Ezeknek a sebességváltókna...
Lásd a részleteket -

Az SPF sorozat négyzet alakú kimeneti karimákkal rendelkezik, 40 mm -es méretű méretekkel. Ezeket a karimákat úgy tervezték, hogy kiemelkedjenek a különféle ipari alkalmazásokban, megbízható teljes...
Lásd a részleteket -

Az 52 mm -es csiszolt bolygófegyver -motor egy kompakt és hatékony megoldás, amelyet különféle alkalmazásokhoz terveztek, amelyek nagy nyomatékot és pontos vezérlést igényelnek. Az 52 mm -es átmérő...
Lásd a részleteket -

A 62 mm -es kefe bolygókészülék motorja sokoldalú és hatékony alkatrész, amelyet széles körben használnak különféle alkalmazásokban, amelyek pontos nyomatékot és sebességszabályozást igényelnek. A ...
Lásd a részleteket
Kapcsolattartási részletek
- TEL: 0086-0571-86951513/86951543
- Fax: 0086-571-86040769
- E-mail: [email protected] / [email protected] / [email protected]
- Iroda: Hangzhou Saiya Transisson Equipment Co., Ltd
- Office Address: 2201 szoba, Wanyin épület, Hangzhou város, Zhejiang tartomány
- Gyár: Zhejiang Saiya Intelligent Manufacturing Co., Ltd.
- Factory Address: No.35 Épület, Zhongnan High-Tech Yunhe Zhigu Ipari Park, Xinan város, Deqing megye, Huzhou város, Zhejiang, Kína
Gyors link
TERMÉK
Ha érdekel vagy
Termékeinkben,
Kérjük, forduljon hozzánk
Copyright © Zhejiang Saiya Intelligent Manufacturing Co., Ltd. All Rights Reserved.
Egyéni sebességváltó -redukciós motorok beszállítói
